行列式
空间在经历了线性变换后,线性变换在空间中表现为对空间进行了拉伸或者收缩,而我们应该如何衡量这种改变呢?
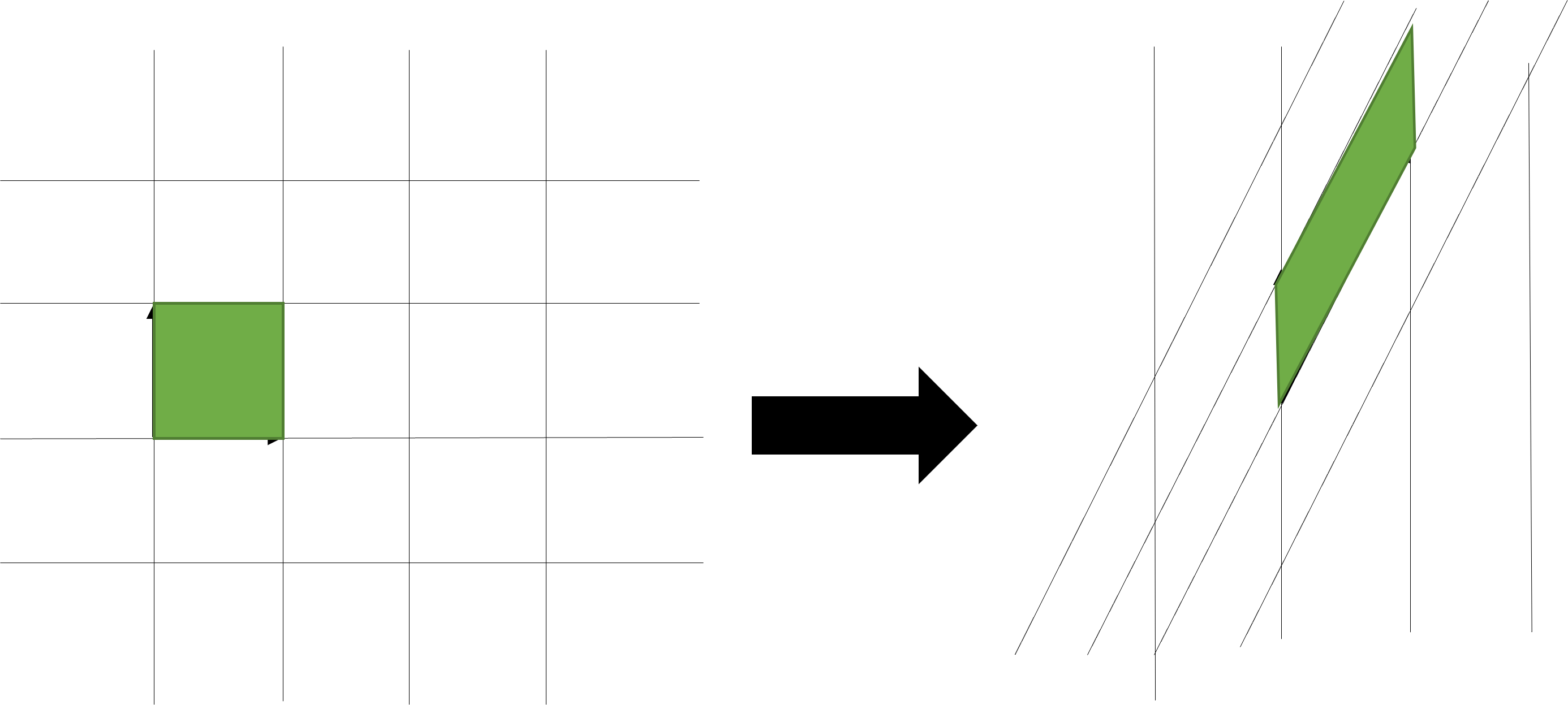
一个空间是由基向量为基础构成的,因此我们可以用基向量组成的区域来衡量这种改变。在二维情形下,这个区域就是两个基向量组成的平行四边形的面积,如下图所示。线性变换对空间进行了拉伸,这个面积也发生的一定的变化。衡量这个面积变化量的量就是行列式(Determinant)。
考虑一种特殊情况,当变换后,两组基向量变成线性相关了,比如$\begin{bmatrix}0 & 0 \\ 1 & 3 \end{bmatrix}$,在空间中,这个表现为两组基向量组成的区域面积为0,所以面积变化了$0/1=0$倍,说明这个矩阵的行列式为0,此时对应着空间的维度发生了降低,即出现了降维。因此,可以得到一个对应关系:
$$
线性相关 \Leftrightarrow Det(M)=0
$$
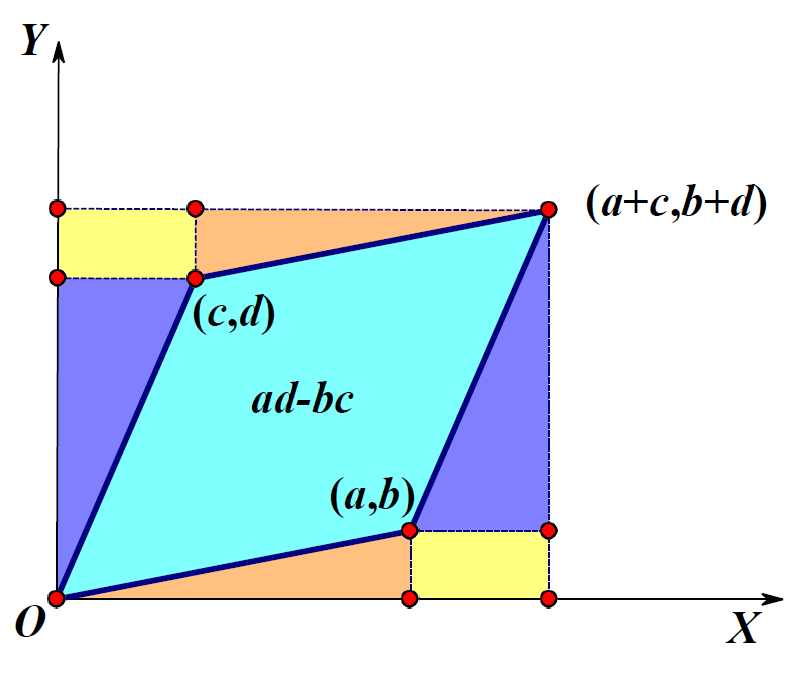
使用行列式的含义来考虑对角矩阵的值。例如对对角矩阵$\begin{bmatrix}a & 0 \\ 0 & b \end{bmatrix}$,它表示第一个基向量变为了$\vec{i}$的a倍,第二个基向量变为了$\vec{j}$的b倍,然后我们可以得到它们组成的区域面积变为了原来的ab倍,即这个行列式的值为ab,是不是很直观呢?
再考虑一个行列式的性质:Det(M1M2)=Det(M1)Det(M2)。在教材中,这个性质的证明是十分繁琐的。在这里,我们就使用上面行列式的含义来解释,可以发现很容易解释这个性质,而不需要繁琐的理论计算。M1M2表示两个线性变换的组合,先进行M2变换,面积变为了最初的Det(M2)倍,然后进行M1变换,面积变为了M2变换后的Det(M1)倍,因此,面积为最初的Det(M1)Det(M2)倍。而如果同时把M1M2的结果作为一次线性变换,那么可以得到面积为最初的Det(M1M2)倍,故这个性质是成立的。是不是很简单?
线性方程组,逆
在上面的介绍中,矩阵是扮演着变换空间的能力。接下来谈一下矩阵在线性方程组(Linear System of Equations)中的应用,这也是线性代数中的一个重点。
线性方程组通常表示为$\mathbf{\mathit{A} } x=b$,其中A为系数矩阵,x为未知量,b为值。其中,x和b均为向量。我们可以与前面的知识联系起来,看看在空间中,这个等式有什么含义。首先,x和b是两个向量,A是矩阵,存储着一个线性变换的信息,那么这个式子的含义就很明显了,对x进行A对应的线性变换之后,与b重合,而我们就是找这个能够与b重合的x。这就与前面的知识联系起来了,然后线性方程组也就没什么特殊的了。
将这个与前面的知识结合起来来理解。根据前面的知识,我们也可以知道,当det(A)不等于0时,线性变换前后的向量是一一对应的,那么这个方程组就存在唯一解。而当det(A)等于0,那么发生了降维。这时,将不一定有解。为什么呢?例如对于二维情况,如果降至一维,即一条直线,那么只有当b恰好在这条直线上时,才存在解,此时有无穷多个解。为什么有无穷多个解呢?在下面介绍零空间就会得到答案,简单来说,就是降维时,存在多对一的映射,比如2D到1D中,直线到点的映射,故存在无穷多个向量能够映射上b上,因此存在无穷多个x。而如果b不在这个直线上,且b不为0,那么将不存在解,这个很好理解,因为没有向量经过线性变换后得到b。
那么如何求解呢?我们可以将这个过程反过来看,对x施加A线性变换得到b,那么对b施加一个线性变换后是不是也能得到x呢?答案是肯定的(当然这里指的不是特殊情况,比如行列式为0)。而这个相反的线性变换就是A的逆(Inverse),表示为A-1。
考虑A-1A,表示先施加A对应的线性变换,然后施加A-1对应的线性变换,相当于将这个空间变换来再变换回去,相当于并没有变换,因此可以得到A-1A=E.
根据上面的分析,当det(A)不为0时,A-1是肯定存在的。而当det(A)=0,那么维度降低,逆将不存在。这是为什么呢?
我们可以根据函数来理解这个。一个函数只能够根据一个输入得到一个输出,而不能根据一个输入得到多个输出。这对于矩阵也是一样的,降了之后,没办法升回去,故不存在逆。(注:我们现在讨论的都是方阵,如果不是方阵,确实能够升维,但不是现在讨论的范畴)
秩
从前面的分析中可以看出,在应用线性变换时,会存在降维的情况。对于二维情况,可能会降至一维,甚至0维,而对于三维情况,可能会降至二维,也可能会降至一维,存在很多种情况。那么我们应该如何衡量呢?
衡量输出空间维度的量就是秩(Rank),也就是线性变换后的维度。
考虑原点(Origin),当维度不变时,输出空间的原点仅与输入空间中的原点对应,但发生降维后,如果二维降至一维,则输出空间中的原点来源于输入中的一条线,如果三维降至二维,那么输出空间中的原点来源于输入空间中的一个平面。而这三种情况中的点、线或者平面,称为零空间(null space)或者核(kernel),定义为经过变换后落在原点的向量的集合(the set of vectors that lands on the origin)。
不只是原点,当二维降至一维时,输出空间的每一个点都来源于输入的一条直线,这也就是为什么线性方程组中在一些特殊情况下会有无穷多个解。再考虑一个特殊情况,如果Det(A)=0,当解为零向量时,那么相当于求解经过线性变换落到原点的向量,此时将肯定存在无穷多个解,且这个解为零空间。因为无论怎么线性变换,零点的位置是不变的,当Det(A)=0时,说明发生了降维,此时零空间肯定会是过原点的直线或平面或更高维的东西。
最后简单介绍以下不是方阵的情况。前面介绍的情况都是维度不变或者降低,但如果我们想将2维变成3维呢?这种变换对应的就是非方阵,之前介绍的都是方阵。其矩阵中的基向量需要与输出维度对应,例如由2D到3D,变换矩阵需要时3*2的,即每一列是三维的。之所以不重点提这个,因为这个并不影响我们去理解线性代数的本质,而且方阵也是最常用的。





写的真好,推给我朋友了
好哒,谢谢支持